戻る
戻る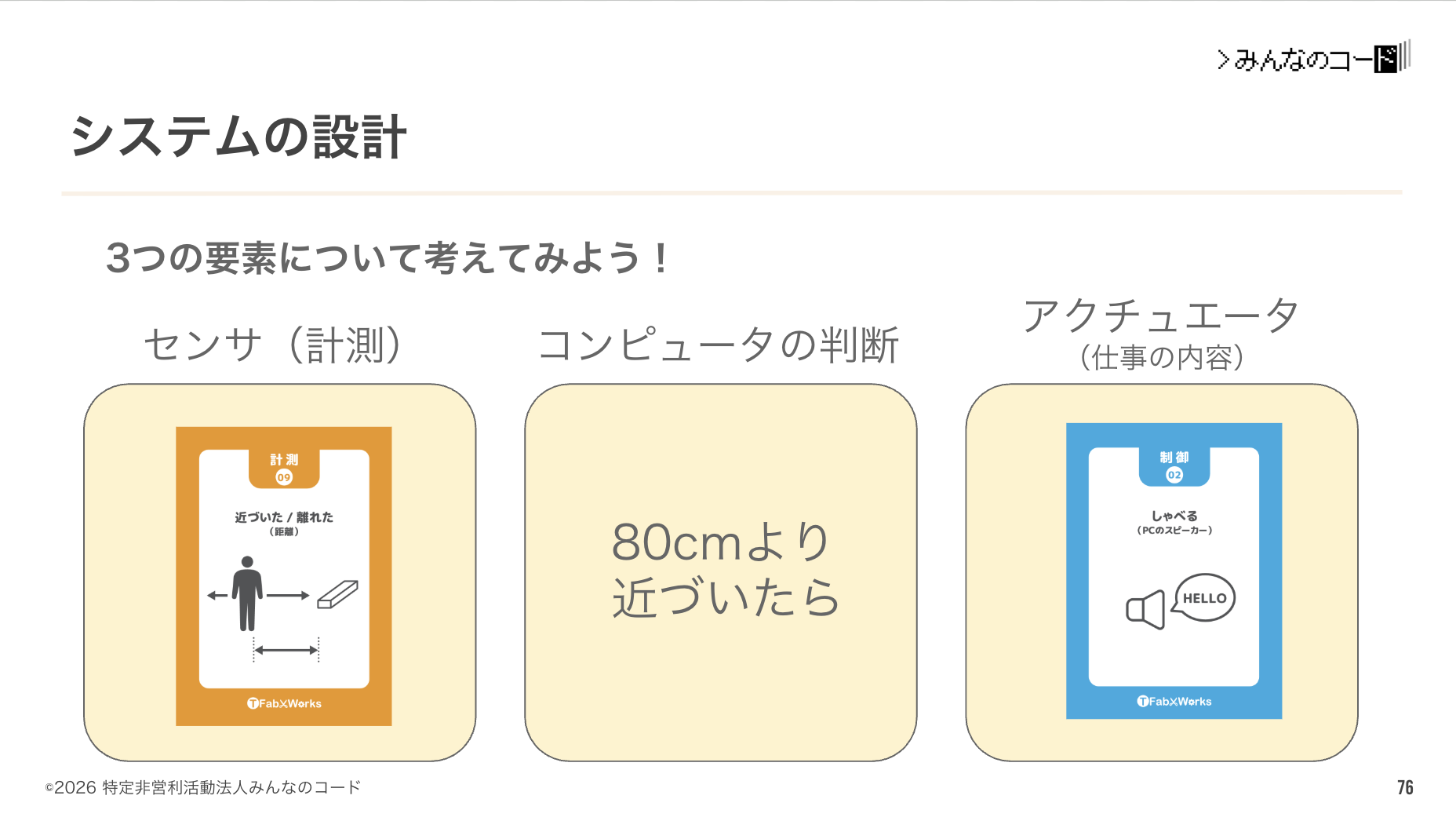
-
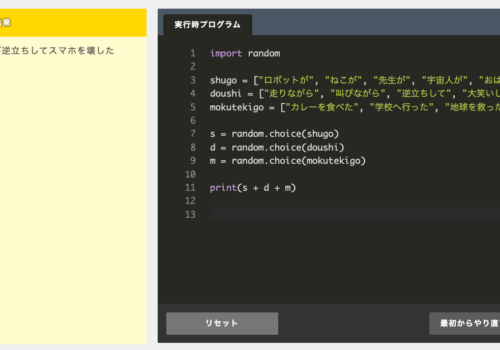
計測・制御や通信ネットワークを活用したロボットの仕組みを理解し、順次、分岐、変数、乱数などの情報処理の手順をプログラムとして記述できる。
-
生活や社会の中から問題を見いだし、ロボットを用いた解決策を構想し、意図した動作になるようプログラムを修正・改善できる。
-
情報技術を適切かつ安全に活用し、地域や学校生活における問題を主体的に解決しようとする態度を養う。
- 生徒の主体性を発揮する、身近な「困りごと」を起点とした課題解決型学習
- 多彩なセンサーや「AI機能」を活用し、生徒の自由なアイデアを形にする活動
- 「計測・判断・出力」の3要素の可視化で、確かな論理的思考力とデバッグ力を育成
授業事例詳細
単元の展開(指導計画)
| テーマ | 今回ねらい | 主な学習活動・ポイント | |
| 第1時 | 計測・制御システムの基礎と基本操作 | ・身の回りの自動化された機械の仕組みを理解する。 ・AkaDakoを用いてセンサの情報を基にアクチュエータを制御する基本的なプログラミングができる。 | ・エアコンなどの例から、センサ→コンピュータの判断→アクチュエータという情報の流れを理解する。 ・AkaDakoを用いて、センサを使ったプログラミングに慣れる。 |
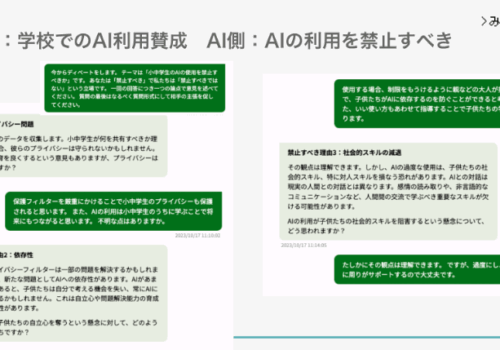
| 第2時 | 多様なセンサと機能の拡張 | 様々なセンサの特性や拡張機能(音声合成・AIなど)を知り、それらを活用したプログラミングの表現方法を広げる。 | ・Akadakoに搭載された様々なセンサをグループごとに自由に試す。 |
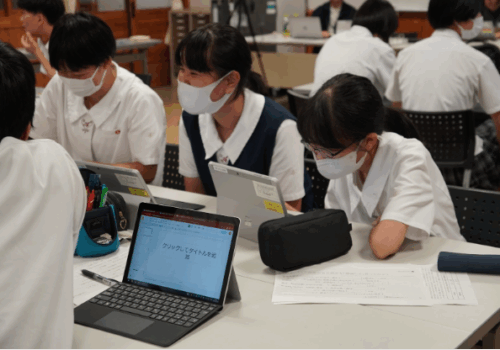
| 第3時 | 生活の中の課題発見とシステム設計 | 生活の中から困りごとを発見し、それを解決するための計測・制御システムの仕組み(3つの要素)を設計することができる。 | ・個人・グループで身の回りの課題を洗い出し、解決するテーマを決める。 ・「課題解決カード」を活用し、センサ→コンピュータの判断→アクチュエータの3要素を設計する。 |
| 第4時 | プログラミングとデバッグ | 設計したシステムに基づきグループで協力してプログラミングを行い、意図通りに動かない場合はエラーの原因を特定し修正(デバッグ)できる。 | ・グループ内で役割分担しながら、設計図をもとにシステムを作成する。 ・エラーを前向きに捉えながら、デバッグを行う。 |
| 第5時 | システムの完成と発表準備 | 計測・制御システムを完成させ、その仕組みや工夫した点を他者に分かりやすく伝えるための発表資料を作成できる。 | ・システムを完成させる。 ・作成したシステムを、他グループにも分かりやすく伝える発表準備を行う。 |
| 第6時 | 発表会と単元の振り返り | 制作したシステムを発表し、相互評価を通じて多様な発想や工夫に触れるとともに、単元の学習を振り返り、社会におけるコンピュータの役割について考察できる。 | ・グループごとに発表を行う。
・完成度だけでなく、アイデアの視点・プログラムの工夫・発表の分かりやすさなどを意識して相互評価を行う。 |