
 戻る
戻るプログラミングで自動運転
「 2025/08/22 up 」
- 自動運転の仕組みやよさ、特徴について理解する。
- センサの特徴を理解し、適切なしきい値を設定する。
- 目的とする動きに近付くよう、どのような動きの組み合わせが必要かを考える。
- 自動運転のよさや課題を基に、今後どのように活用していけばよいかを考える。
- 自動運転やネットワーク技術に興味をもち、そのよさや課題について主体的に考えようとする。
- 目的とした動きに近付くよう、論理的推論で試行錯誤しながら粘り強く取り組む。
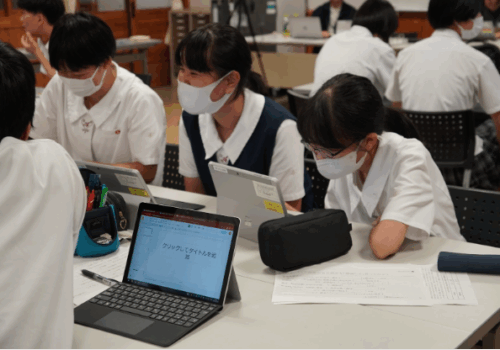
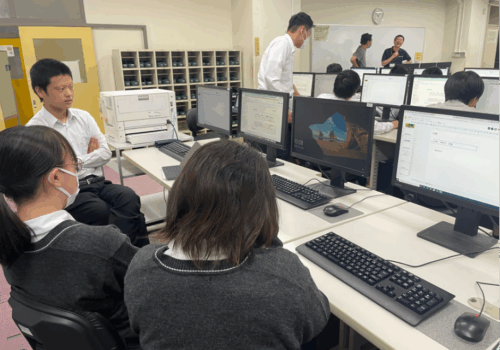
- 様々な状況に対応して自動走行できる車のモデル製作に取り組んだ。まず単に走らせることから、センサを用いた動作の制御、ネットワーク通信を生かした制御など段階的に場の状況を変えて活動を設定した。そうすることで、体験的に自動運転の制御のプログラムを考えながら、センサやネットワーク通信の基本的な仕組みや特徴、その有用性などについて気付くことができるようにした。
- 私たちの生活の中には、自動ドアや自動掃除機、防犯照明など、あたかも機械自身が意思をもって動いているように見えるものが多く存在している。身の回りの生活に活用されているコンピュータやネットワーク技術の存在に目を向けさせることで、コンピュータへの理解を深めたり、生活や社会の変化について考えたりすることができるようにしていきたいと考える。
事業事例詳細
第1時 コースに対応して、動いたり、止まったり、曲がったりするプログラムを考える。
- 自動で走行する車やロボットを 見て、どんなプログラムが組まれているかを予想する。
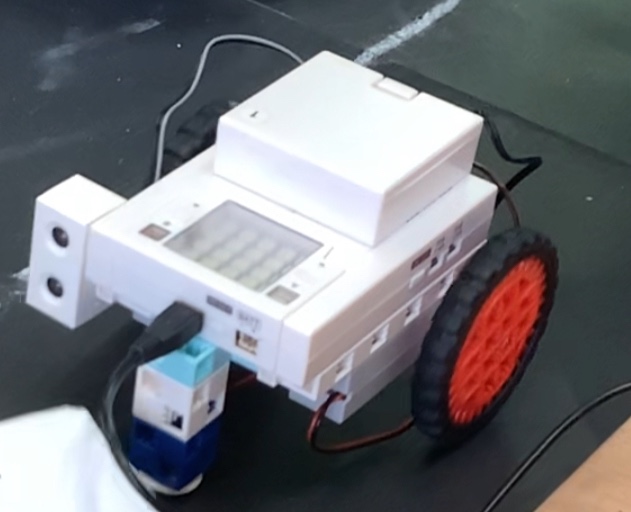
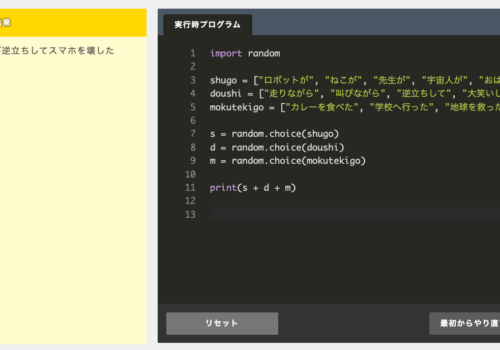
- 簡単なコースを道順通りに対応して走行する自動運転車のプログラムを組む。
第2・3時 壁や物などを認識して自動運転する車のプログラムを組むことで、センサの仕組みやよさについて考える。
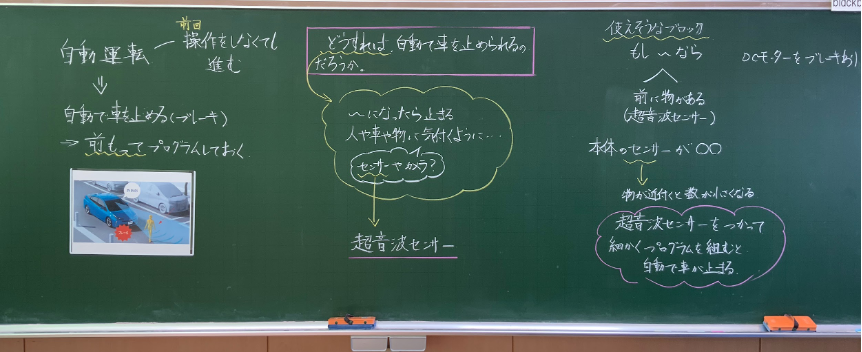
- 自動運転の映像を見て、センサの必要性に気付き、どのような指示が必要かを考える。
- 超音波センサを用いて、物を認識して動いたり衝突を回避したりするプログラムを考え、ロボットを動かしてみてプログラムを修正する。
第4・5時 無線通信を生かした自動運転のプログラムを組むことで、無線通信の仕組みやよさについて考える。
- 無線通信の機能を生かし、デバイス間で情報をやり取りすることで離れた場所から車を発進させたり停車させたりするプログラムを組み、実際に動かしてみてプログラムを修正する。
- 自動走行の動きに反応して無線通信を行い、デバイス間で情報をやり取りすることで車を制御するプログラムを考えたり修正したりする。
第6時 自動運転のよさやネットワークでつながり合う社会のよさについて考える。
- 自動運転の技術やネットワーク技術の進歩による生活や社会の変化について考えることで、未来の自分たちの住む社会について当事者意識をもつ。
その他のおすすめ記事


© みんなのコード All rights reserved.